

Некоторые авторы используют термин нелинейная наука для исследования нелинейных систем. Этот термин оспаривается другими: Википедия site:wikiboard.ru
К нелинейным системам относятся все системы, которые не могут быть описаны линейными дифференциальными уравнениями. Нелинейные системы очень многообразны, поэтому практически нельзя говорить о едином “классе” нелинейных систем, противостоящем классу линейных систем. Исследование нелинейных систем связано с преодолением значительных математических трудностей. Основная трудность состоит в том, что не существует единого точного метода решения нелинейных уравнений и для каждого вида нелинейности приходится изыскивать специфический частный метод.
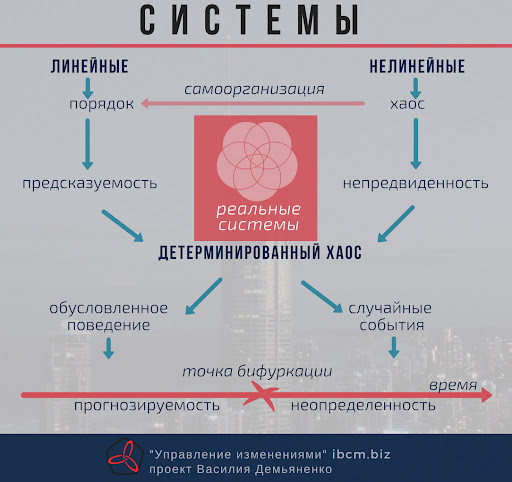
Несмотря на большие трудности исследования нелинейных систем, интерес к ним за последнее время резко возрос. Это объясняется, в частности, тем, что по показателям качества процесса регулирования (быстродействие, точность) нелинейные системы очень часто превосходят соответствующие линейные системы. Это относится к таким системам, в которые целенаправленно вводятся специальные нелинейности, определяющие эффективность динамических процессов.
Выдающаяся роль в создании и развитии методов исследования нелинейных систем принадлежит русским ученым. Наиболее важный вклад в эту область бал сделан А.М.Ляпуновым, опубликовавшим в 1892 году свою работу “Общая задача об устойчивости движения”. В этой работе было впервые дано определение понятия устойчивости движения и разработаны методы решения этой задачи. До настоящего времени методы, предложенные А.М.Ляпуновым, являются наиболее строгими при исследовании динамики нелинейных систем.
В 1937 году были опубликованы фундаментальные работы А.А.Андронова и С.Э.Хайкина “Теория колебаний”, а также Н.М.Крылова и Н.Н.Боголюбова “Введение в нелинейную механику”. Эти работы, получившие мировую известность, послужили основой для решения важных исследований нелинейных систем.
Нелинейности, встречающиеся в системах автоматического управления, могут иметь различный характер. Некоторые нелинейности вводится специально для получения требуемых динамических характеристик регулирования или из-за экономических соображений, т. е. тогда, когда проектируемая с преднамеренно вводимой нелинейностью система имеет выигрыш в весе, стоимости, размерах. При этом предполагается, что рабочие характеристики такой системы должны удовлетворять заданным требованиям.
Исследование нелинейных систем является весьма актуальной и важной задачей. Этому вопросу посвящено большое количество работ. Полученные результаты, однако, не являются универсальными и могут быть успешно использованы лишь для решения определенного класса задач.
При проектировании нелинейных систем автоматического регулирования возникает необходимость в исследовании влияния нелинейных звеньев системы на динамические процессы при всевозможных режимах работы. Для такого рода исследований существует достаточно много различных методов, которые, однако, не могут рассматриваться как универсальные и успешно решают поставленную задачу лишь для определенного типа нелинейности.
Наиболее широкое распространение получили следующие методы анализа нелинейных систем:
— линейной аппроксимации (линеаризации);
— кусочно-линейной аппроксимации;
— численные методы;
— фазовой плоскости;
— гармонической линеаризации;
— моделирования.
В математике и науке нелинейная система, в которой изменение выхода не пропорционально изменению входа. Нелинейные задачи интересуют инженеров, биологов, физиков, математиков и многих других ученых, потому что большинство системы по своей природе нелинейны. Нелинейные динамические системы, описывающие изменения переменных во времени, могут казаться хаотическими, непредсказуемыми или противоречащими интуиции, в отличие от гораздо более простых линейных систем.
Обычно поведение нелинейной системы описывается математикой с помощью нелинейной системы уравнений, которая представляет собой совокупность одновременных уравнений, в которых неизвестные (или неизвестные функции в случае дифференциальных уравнений) выглядят как переменные полинома степени выше единицы или в аргументе функции, которая не является полиномом первой степени. Другими словами, в нелинейной системе уравнений решаемое уравнение (я) не может быть записано как линейная комбинация неизвестных переменных или функций которые появляются в них. Системы могут быть определены как нелинейные, независимо от того, присутствуют ли в уравнениях известные линейные функции. В частности, дифференциальное уравнение является линейным, если оно линейно по отношению к неизвестной функции и ее производным, даже если оно нелинейно по отношению к другим переменным, входящим в него.
Поскольку нелинейные динамические уравнения трудно решить, нелинейные системы обычно аппроксимируются линейными уравнениями (линеаризация). Это хорошо работает с некоторой точностью и некоторым диапазоном входных значений, но некоторые интересные явления, такие как солитоны, хаос и сингулярности, скрыты линеаризацией. Отсюда следует, что некоторые аспекты динамического поведения нелинейной системы могут показаться нелогичными, непредсказуемыми или даже хаотическими. Хотя такое хаотическое поведение может напоминать случайное поведение, на самом деле оно не случайное. Например, некоторые аспекты погоды производят сложные эффекты повсюду. Эта нелинейность — одна из причин, по которой точные долгосрочные прогнозы невозможны с использованием современных технологий кажутся хаотичными.
С выставкой можно ознакомиться в А-112 (НТЗ, НТБ ЮФУ)